문제
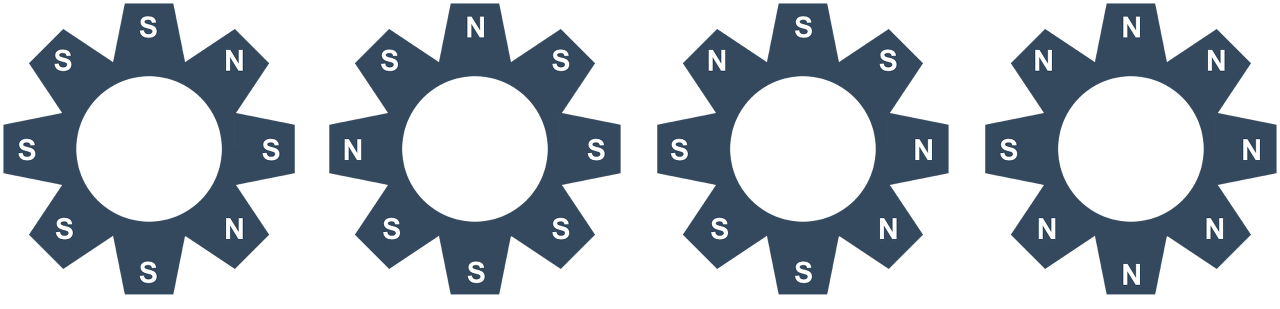
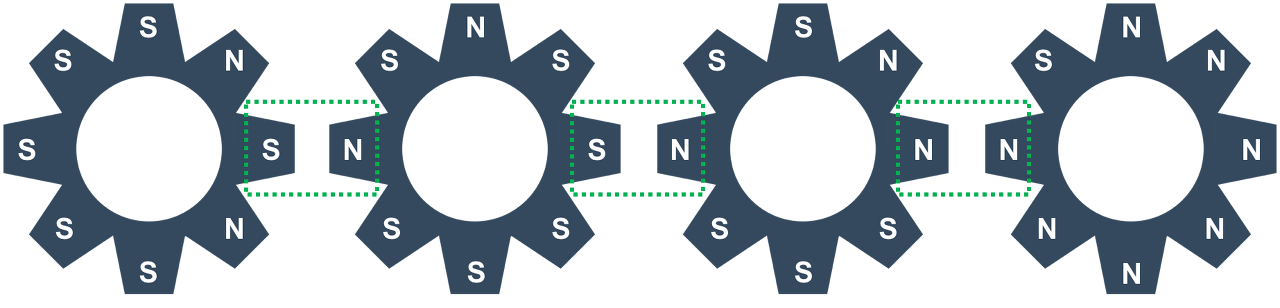
총 8개의 톱니를 가지고 있는 톱니바퀴 4개가 아래 그림과 같이 일렬로 놓여져 있다. 또, 톱니는 N극 또는 S극 중 하나를 나타내고 있다. 톱니바퀴에는 번호가 매겨져 있는데, 가장 왼쪽 톱니바퀴가 1번, 그 오른쪽은 2번, 그 오른쪽은 3번, 가장 오른쪽 톱니바퀴는 4번이다.
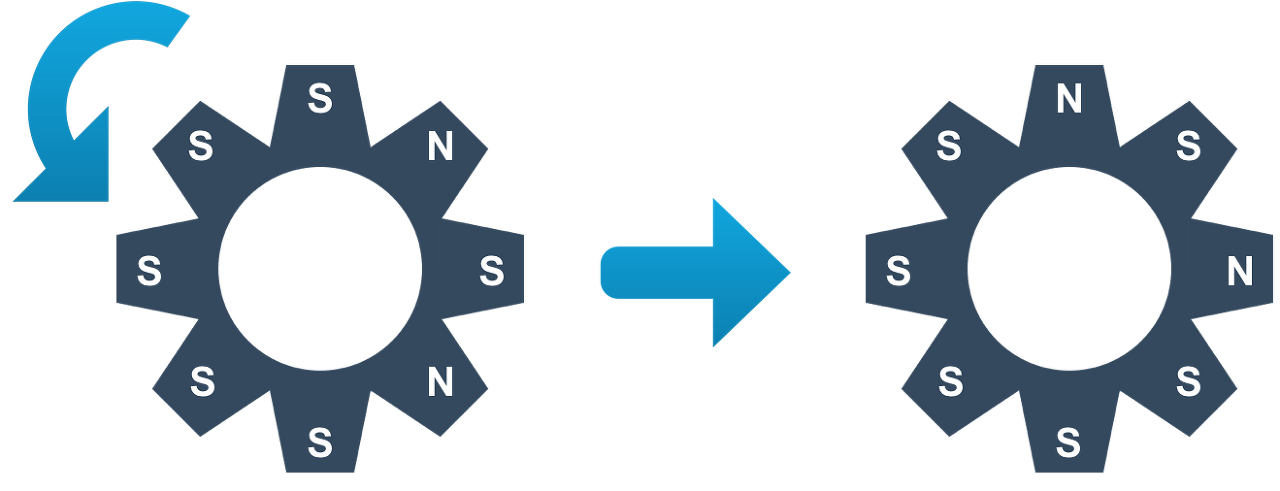
이때, 톱니바퀴를 총 K번 회전시키려고 한다. 톱니바퀴의 회전은 한 칸을 기준으로 한다. 회전은 시계 방향과 반시계 방향이 있고, 아래 그림과 같이 회전한다.
톱니바퀴를 회전시키려면, 회전시킬 톱니바퀴와 회전시킬 방향을 결정해야 한다. 톱니바퀴가 회전할 때, 서로 맞닿은 극에 따라서 옆에 있는 톱니바퀴를 회전시킬 수도 있고, 회전시키지 않을 수도 있다. 톱니바퀴 A를 회전할 때, 그 옆에 있는 톱니바퀴 B와 서로 맞닿은 톱니의 극이 다르다면, B는 A가 회전한 방향과 반대방향으로 회전하게 된다. 예를 들어, 아래와 같은 경우를 살펴보자.
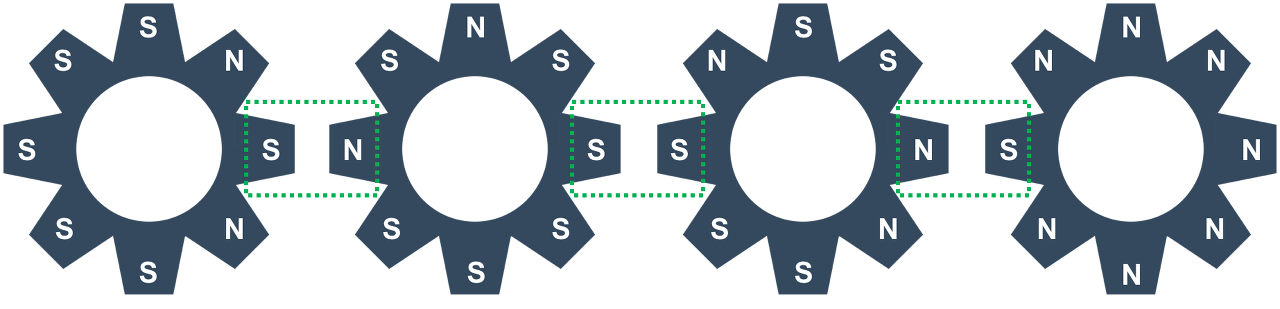
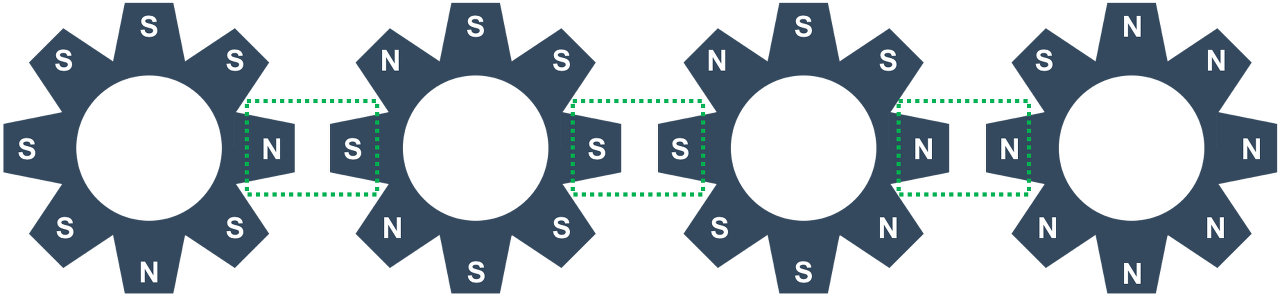
두 톱니바퀴의 맞닿은 부분은 초록색 점선으로 묶여있는 부분이다. 여기서, 3번 톱니바퀴를 반시계 방향으로 회전했다면, 4번 톱니바퀴는 시계 방향으로 회전하게 된다. 2번 톱니바퀴는 맞닿은 부분이 S극으로 서로 같기 때문에, 회전하지 않게 되고, 1번 톱니바퀴는 2번이 회전하지 않았기 때문에, 회전하지 않게 된다. 따라서, 아래 그림과 같은 모양을 만들게 된다.
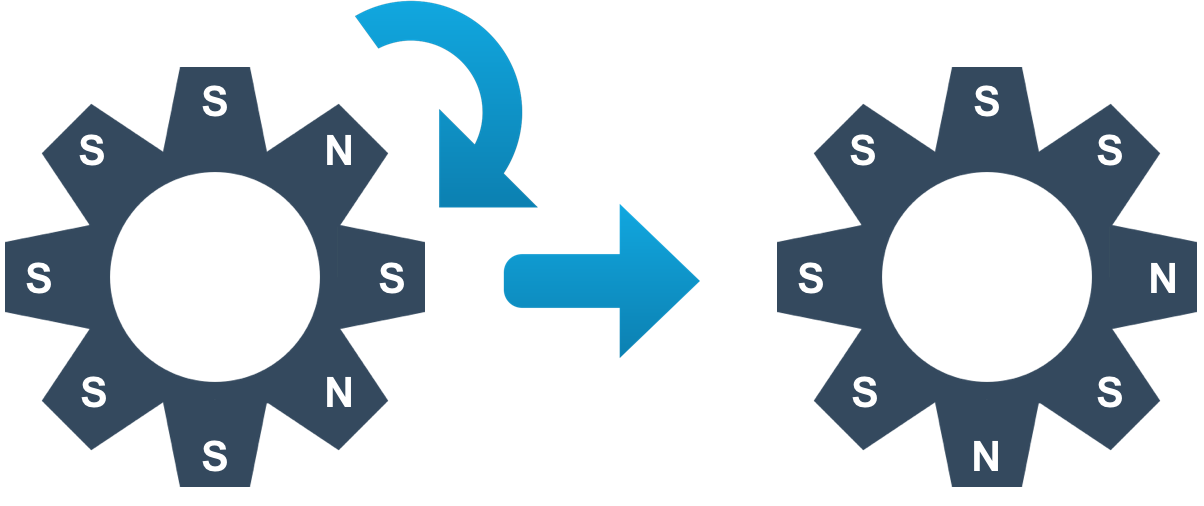
위와 같은 상태에서 1번 톱니바퀴를 시계 방향으로 회전시키면, 2번 톱니바퀴가 반시계 방향으로 회전하게 되고, 2번이 회전하기 때문에, 3번도 동시에 시계 방향으로 회전하게 된다. 4번은 3번이 회전하지만, 맞닿은 극이 같기 때문에 회전하지 않는다. 따라서, 아래와 같은 상태가 된다.
톱니바퀴의 초기 상태와 톱니바퀴를 회전시킨 방법이 주어졌을 때, 최종 톱니바퀴의 상태를 구하는 프로그램을 작성하시오.
입력
첫째 줄에 1번 톱니바퀴의 상태, 둘째 줄에 2번 톱니바퀴의 상태, 셋째 줄에 3번 톱니바퀴의 상태, 넷째 줄에 4번 톱니바퀴의 상태가 주어진다. 상태는 8개의 정수로 이루어져 있고, 12시방향부터 시계방향 순서대로 주어진다. N극은 0, S극은 1로 나타나있다.
다섯째 줄에는 회전 횟수 K(1 ≤ K ≤ 100)가 주어진다. 다음 K개 줄에는 회전시킨 방법이 순서대로 주어진다. 각 방법은 두 개의 정수로 이루어져 있고, 첫 번째 정수는 회전시킨 톱니바퀴의 번호, 두 번째 정수는 방향이다. 방향이 1인 경우는 시계 방향이고, -1인 경우는 반시계 방향이다.
출력
총 K번 회전시킨 이후에 네 톱니바퀴의 점수의 합을 출력한다. 점수란 다음과 같이 계산한다.
- 1번 톱니바퀴의 12시방향이 N극이면 0점, S극이면 1점
- 2번 톱니바퀴의 12시방향이 N극이면 0점, S극이면 2점
- 3번 톱니바퀴의 12시방향이 N극이면 0점, S극이면 4점
- 4번 톱니바퀴의 12시방향이 N극이면 0점, S극이면 8점
구현 방법
입력: 하나의 숫자마다 입력받도록 하기 위해서 scanf_s("%1d", &gear[i][j]);를 이용
* 참고로 백준에선 scanf_s 대신 scanf로 코드를 제출해야 컴파일 에러가 나지 않음!
1. 각 톱니바퀴가 시계방향(1)으로 회전할 지, 반시계방향(-1)으로 회전할 지 gear_rotation 행렬에 입력할 수 있도록 선언
2. gear_rotation 를 0으로 초기화 한 뒤 각 회전경우에서 기준 톱니바퀴의 오른쪽 바퀴들이 어떻게 동작할 지, 왼쪽 바퀴들이 어떻게 동작할 지 Gear_Rotation_set 함수를 실행시켜 gear_rotation 행렬에 입력
3. 구한 gear_rotation 행렬의 회전방향에 알맞게 4개의 톱니바퀴를 Gear_Rotation 함수를 통해 회전시킴
4. 주어진 회전 횟수 K만큼 위 2~3의 과정을 반복
5. 거듭제곱을 이용하여 점수 계산
구현 시간
0ms
#include <iostream>
#include <cmath>
using namespace std;
int gear[4][8]; // gear[톱니바퀴 번호][0: N극, 1: S극]
int gear_rotation[4];
void CW(int i) { // i번째 톱니바퀴 시계방향 회전
int temp = gear[i][7];
gear[i][7] = gear[i][6];
gear[i][6] = gear[i][5];
gear[i][5] = gear[i][4];
gear[i][4] = gear[i][3];
gear[i][3] = gear[i][2];
gear[i][2] = gear[i][1];
gear[i][1] = gear[i][0];
gear[i][0] = temp;
}
void CCW(int i) { // i번째 톱니바퀴 시계반대방향 회전
int temp = gear[i][0];
gear[i][0] = gear[i][1];
gear[i][1] = gear[i][2];
gear[i][2] = gear[i][3];
gear[i][3] = gear[i][4];
gear[i][4] = gear[i][5];
gear[i][5] = gear[i][6];
gear[i][6] = gear[i][7];
gear[i][7] = temp;
}
void gear_rotation_init() {
for (int i = 0; i < 4; i++) {
gear_rotation[i] = 0;
}
}
void Gear_Rotation_set(int gear_num, int dir) {
gear_rotation[gear_num] = dir;
int init_gear_num = gear_num;
while (gear_num >= 0 && gear_num < 3) { // 오른쪽 톱니바퀴와 비교
if (gear[gear_num][2] != gear[gear_num + 1][6])
{ // 오른쪽 톱니바퀴와 극성이 다를 시
if (gear_rotation[gear_num] == 1) {
gear_rotation[gear_num + 1] = -1;
}
else if (gear_rotation[gear_num] == -1) {
gear_rotation[gear_num + 1] = 1;
}
gear_num++;
}
else { // 극성이 같을 시 오른쪽 더 확인할 필요없으니 빠져나옴
break;
}
}
gear_num = init_gear_num;
while (gear_num > 0 && gear_num < 4) { // 왼쪽 톱니바퀴와 비교
if (gear[gear_num][6] != gear[gear_num - 1][2])
{ // 왼쪽 톱니바퀴와 극성이 다를 시
if (gear_rotation[gear_num] == 1) {
gear_rotation[gear_num - 1] = -1;
}
else if (gear_rotation[gear_num] == -1) {
gear_rotation[gear_num - 1] = 1;
}
gear_num--;
}
else { // 극성이 같을 시 왼쪽 더 확인할 필요없으니 빠져나옴
break;
}
}
}
void Gear_Rotation() {
for (int i = 0; i < 4; i++) {
if (gear_rotation[i] == 1) {
CW(i);
}
else if (gear_rotation[i] == -1) {
CCW(i);
}
}
}
int main()
{
int K;
int R[101][2];
for (int i = 0; i < 4; i++) {
for (int j = 0; j < 8; j++) {
scanf_s("%1d", &gear[i][j]);
}
}
cin >> K;
for (int i = 0; i < K; i++) {
for (int j = 0; j < 2; j++) {
cin >> R[i][j];
}
}
for (int k = 0; k < K; k++) {
gear_rotation_init();
Gear_Rotation_set(R[k][0] - 1, R[k][1]);
Gear_Rotation();
}
int score = 0;
for (int i = 0; i < 4; i++) {
if (gear[i][0] == 1) {
score += pow(2, i);
}
}
cout << score;
return 0;
}'프로그래밍 언어 공부 > C++' 카테고리의 다른 글
| 백준 17779번 : 게리멘더링2 with C++ (0) | 2023.04.16 |
|---|---|
| 백준 15685번 : 드래곤 커브 with C++ (0) | 2023.04.12 |
| 백준 14890번 : 경사로 with C++ (0) | 2023.04.07 |
| 백준 14503번 : 로봇청소기 with C++ (0) | 2023.04.06 |
| 백준 14502번 : 연구소 with C++ (0) | 2023.04.05 |

